Velobotics is dedicated to pioneering R&D and innovation of the BRAINBOX, with the software system as the cornerstone and the hardware system as the support. Our mission is to create a safe, sustainable, and efficient BRAINBOX, empowering applications across multiple scenarios and sectors.
SAFETY
EVOLUTION
EFFICIENT
Create a data-driven multi-scenario autonomous driving mass production solution
AVOS, our self-developed autonomous driving operating system, is based on the closed-loop integration of humans, vehicles, and roads. Built on a layered decoupling architecture of system, functional, and application software, AVOS ensures high functional cohesion and low business coupling. Using a real-time operating system, AVOS supports multi-scenario and full-condition autonomous driving with key technologies like high-precision environmental sensing, centimeter-level fusion positioning, and human-like behavioral decision-making.
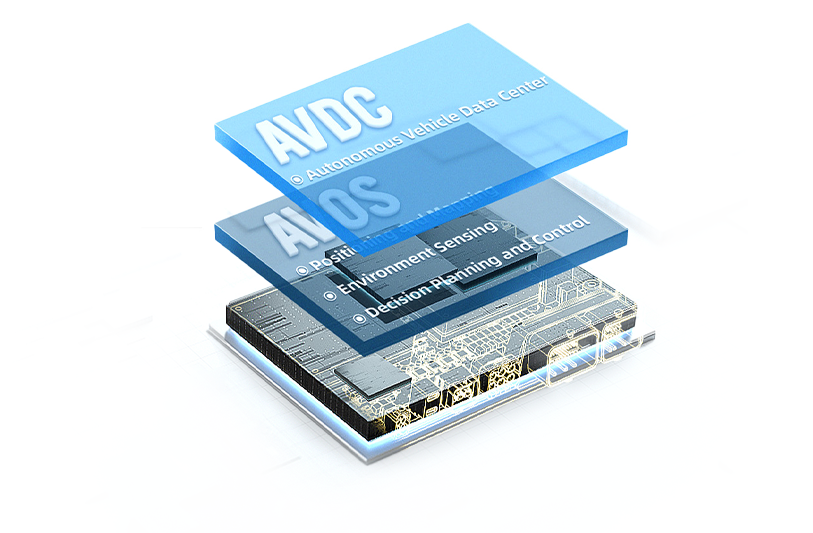
Our independently developed autonomous driving central computing unit comes with various IP-architecture microprocessor ICs to deliver a powerful heterogeneous computing unit. It incorporates real-time underlying MCUs, supports safety island, lock-step core and functional security authentication to construct a reliable control unit. The system integrates a broad array of sensor interfaces, including multi-channel GMSL2 cameras, Gigabit Ethernet, CAN-FD, LIN, DSI, and other low-speed interfaces, along with 5G communication, V2X communication, and RTK high-precision positioning. This enables a fully connected smart driving experience with a single vehicle and networked smart driving domain.
AVDC, a data closed-loop system combining vehicle-side reasoning and cloud-side training, streamlines the entire process from data collection and mining, data cleaning, data labeling, model training and optimization, simulation evaluation, and OTA deployment. At the vehicle end, model reasoning and data mining tools are employed to extract valuable scene data from various sources, including manual demonstrations, autonomous driving data, and interest scenarios. On the cloud side, three major platforms for data management, model training and simulation evaluation are deployed to realize automated data management and algorithm iteration.
Autonomous Vehicle Operating System
BRAINBOX
Autonomous Vehicle Data Center
Autonomous Driving Operating System Empowering Multiple Scenarios
AVOS, a versatile operating system developed by Velobotics, achieves dual decoupling between application and hardware as well as full-stack empowerment.
AVOS focuses on breaking through challenges in neural network design and training for decision-making, planning and control. It maximizes the optimization of information transfer between sensors and actuators by using a full-stack module that allows for rapid updates through data closed-loop. The system also develops an innovative road topology based on lane flow prediction and key point detection, re-constructing the neural network model for mapless driving. This enhances the overall intelligence and safety of high-level autonomous driving.

The multi-sensor fusion perception system independently developed by Velobotics achieves millisecond-level time synchronization and pixel-level spatial synchronization, enabling functions such as 2D/3D target detection, environment understanding, traffic light detection, and road marking detection. This system has technical advantages such as high precision and lightweight.

Leveraging proprietary AI deep learning technology, our planning algorithms guide the vehicle through a range of driving maneuvers. Compared to the more commonly used rule-based approach, the data-driven approach allows our planning algorithms to efficiently adapt to traffic rules or driving styles in new scenarios. By minimizing the systems engineering effort needed to update the logic of the planning algorithm, our approach enables the algorithm to achieve both high scalability and rapid iterative updates.
AVDC Autonomous Vehicle Data Center Combining Vehicle-Side Reasoning and Cloud-Side Training
By leveraging the same software and hardware architecture, this approach breaks through both data and architectural barriers between L3 and L4 levels. It also enables functional upgrades of the L4 system through data gathered from the front-loaded mass production.


Helps velobotics efficiently empower multiple scenarios


